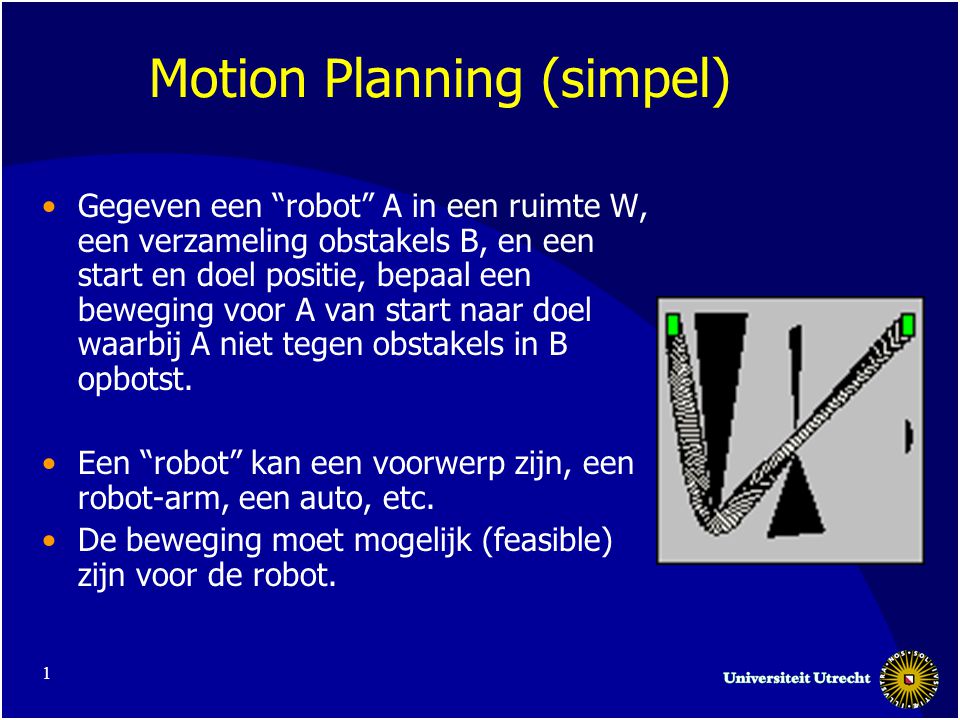
1 Motion Planning (simpel) •Gegeven een “robot” A in een ruimte W, een verzameling obstakels B, en een start en doel positie, bepaal een beweging voor A van start naar doel waarbij A niet tegen obstakels in B opbotst. •Een “robot” kan een voorwerp zijn, een robot-arm, een auto, etc. •De beweging moet mogelijk (feasible) zijn voor de robot.
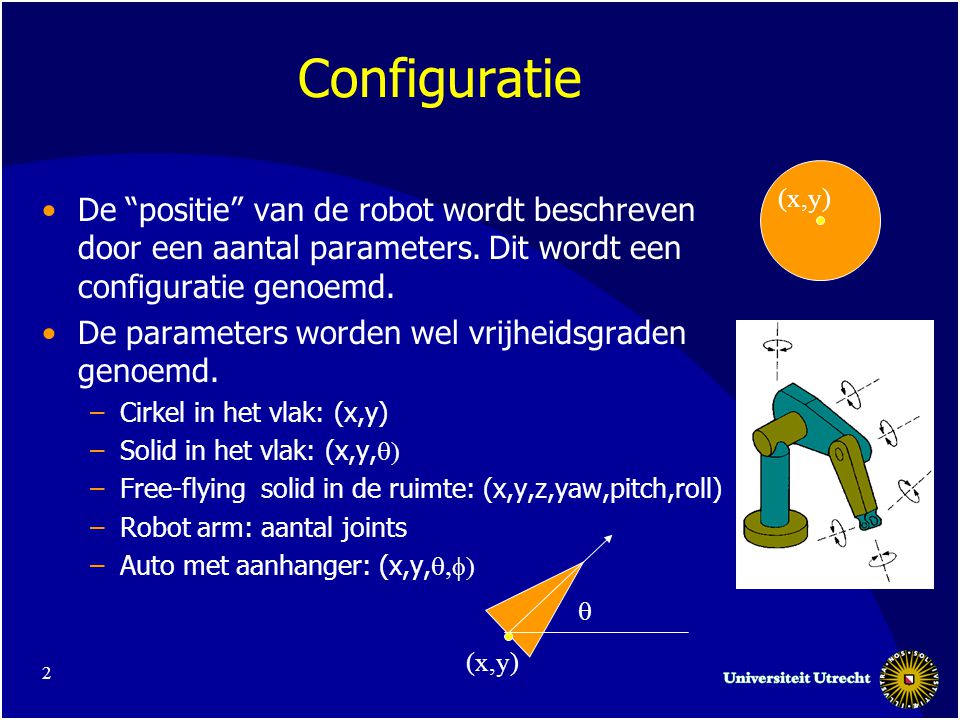
2 Configuratie •De “positie” van de robot wordt beschreven door een aantal parameters. Dit wordt een configuratie genoemd. •De parameters worden wel vrijheidsgraden genoemd. –Cirkel in het vlak: (x,y) –Solid in het vlak: (x,y, –Free-flying solid in de ruimte: (x,y,z,yaw,pitch,roll) –Robot arm: aantal joints –Auto met aanhanger: (x,y, (x,y)
3 Configuratieruimte •De ruimte C van alle configuraties voor de robot. •Dimensie is het aantal vrijheidsgraden m •De ruimte is niet R m ! –Speciale rol rotationele parameters –Lokaal wel –Je kunt hem voorstellen als een aantal “kaarten”
4 Workspace •De ruimte W waarin de robot zich beweegt (R 2 of R 3 ). •Voorbeelden: –Cirkel in vlak: W = R 2, C = R 2 –Solid in vlak: W = R 2, C = R 2 x[0:360] –Solid in de ruimte: W = R 3, C = R 3 x[0:360] 2 x[0:180] –Robot arm: W = R 3, C = [0:360] m
5 Obstakels •Een obstakel B i in de workspace correspondeert met een obstakel CB i = {q in C waarvoor A(q) B i snijdt} A(q) is de robot a in configuratie q
6 Vrije ruimte •C forb = vereniging van alle Cb i •C free = C – C forb •Vrije configuratie ruimte bestaat uit alle configuraties waarbij de robot geen obstakel snijdt.
7 Voorbeeld voor translatie Workspace Configuration ruimte Minkowski verschil
8 Beweging •Een beweging is eeen continue verandering van de configuratie, eventueel met tijd-informatie. •Een beweging van de robot in de workspace is een pad in de configuratie ruimte. •Een beweging is botsingsvrij als in C free ligt.
9 Beweging
10 Motion Planning •Motion planning is dus in feit het vinden van een (kort) pad in the vrije ruimte. •Problemen: –Dimensie configuratie is hoog –Vorm van vrije ruimte is complex •Typisch O(n m ) complexiteit •Hoge orde algebraische krommen •Oplossingen –Als m klein is (2 of 3) dan is het te doen –Benader de ruimte –Probeer in de workspace te werken
11 Oplossingsstrategieen •Roadmap methodes –Bouw een netwerk (graaf) van goede bewegingen •Cell decompositie –Bereken een benadering van de vrije ruimte •Locale methodes –Neem beslissingen op grond van locale informatie –Potentiaalveld methode
12 Roadmap methodes •Een roadmap is een netwerk van wegen door de vrije ruimte. •Na het berekenen hiervan vind men een pad door –Naar het netwerk te gaan –Dit te volgen tot dichtbij het doen –Naar het doel te gaan s g
13 Roadmap methodes •Visibility graph •Voronoi diagram •Probabilistic roadmaps •…
14 Visibility Graph •Bepaal alle raaklijnen aan 2 obstakels (in het vlak) •Bepaal de raaklijnen vanuit start en goal aan de obstakels. •Vindt het kortste pad in deze graph. –Is ook echt het kortste pad –Complexiteit is hoog –Generaliseert niet goed
15 Visibility Graph
16 Voronoi Diagram •Een Voronoi diagram bestaat uit de posities met gelijke afstand tot 2 obstakels
17 Retractie
18 Probabilistic Roadmap Method •Bouw de roadmap met behulp van random configuraties en random verbindingen
19 Cell decompositie •Bereken een verdeling van de vrije configuratie ruimte in eenvoudige (convexe cellen) •Kies een configuratie in elke cell en in de plek waar paren cellen elkaar raken. •Bouw hieruit een graaf. •Voor een query: bepaal de cellen van start en doel, beweeg in die cellen naar het middelpunt en volg vervolgens de graaf.
20 Cell decompositie s g Exact of benadering (bijvoorbeeld met quad-boom)
21 Local Methods •Bepaal op grond van de huidige configuratie, de configuratie waar de robot naar toe moet, en obstakels in de buurt een goede richting. •Beweeg een klein stapje in die richting en herhaal het proces. •Probeer te vermijden dat je vast komt te zitten.
22 Local Methods •Potentiaal-veld methode: doel trek de robot aan, obstakels stoten de robot af.
23 Uitbreidingen •Meerdere bewegende objecten –Meerdere robots –Robot armen •Kinematische beperkingen –Auto •Onzekerheid –Compliant motion •Beweegbare objecten –Manipulatie –Grasping
24 Meerdere robots •Beschouw als 1 robot systeem met nxm vrijheidsgraden en plan alle paden tegelijkertijd (centralized planning) •Plan de paden apart en coordineer deze paden (decoupled planning) •Gebruik exclusion zones en wijs deze aan robots toe
25 Decoupled planning •Men gebruikt een coordinatie diagram Pad 1 Pad 2
26 Robot armen •Elke joint is een vrijheidsgraad. •Meestal beperkingen op de hoek. •Probleem: voor eindpositie alleen tool positie aangegeven –Gebruik inverse kinematics –Hoe kies je uit meerdere oplossingen?
27 Kinematische beperkingen •Het aantal sturings parameters is kleiner dan het aantal vrijheidsgraden. •In de configuratieruimte kan men niet op willekeurige wijze bewegen. Het pad moet aan bepaalde eisen voldoen. •Voor een auto: -sin dx + cos dy = 0 •Small-time locally controllable –Als de afstand tussen start en doel in de configuratie ruimte naar 0 gaat gaat de lengte van het pad ook naar 0 (indien geen obstakels)
28 Kinematische beperkingen
29 Onzekerheid •Robot voeren bewegingen niet precies uit. –Control probleem –Onzekerheid kan beperkt worden door compliant motion •De kennis over de omgeving is onvolledig –Combineer met sensing gegevens en gebruik herplanning indien nodig. –Maak gebruik van grove benaderingen van obstakels.
30 Beweegbare objecten •Om objecten te manipuleren moet eeh robot ze oppakken en verplaatsen. –We moeten de beweging voor de robot alleen en voor de combinatie plannen. –Hoe pakken we het voorwerp beet (grasping). –Op welke plekken kunnen we het neerzetten. •Om ruimte te maken is het some mogelijk voorwerpen tijdelijk te verplaatsen.
31 AI en taskplanning •De AI van een systeem bepaald de taken van de “robot” •De taskplanning vertaald die taken in bepaalde gewenste locaties •De motion planning bepaald de juiste beweging om bij die locaties te komen