Download de presentatie
De presentatie wordt gedownload. Even geduld aub

1
Path planning voor elastische objecten Robin Langerak Planning paths for elastic objects under manipulation constraints LamirauxKavraki

2
Drie soorten deformaties Deformatie door robot Deformatie door objecten in de workspace Tijdelijke deformatie

5
Indeling Probleemdefiniering Mechanische modellen Oplossing met restricties Toepassingen

6
Probleemdefiniering Configuration space heeft oneindig aantal dimensies Vrij pad niet automatisch mechanisch mogelijk

7
Probleemdefiniering Oplossing: –Benaderen –Mechanisch modelleren

8
Elasticiteit Diffeomorphisme = φ q : V 0 -> V q Differential = T x φ q Hoe definieren we deformatie? Hoe definieren we elasticiteit?

9
Local deformation field U = T x φ q (u)V = T x φ q (v) e(x) : (u,v) -> ½ ( (U|V) – (u|v) ) e(x) constant bij rigid-body transformation
V = T x φ q (v) e(x) : (u,v) -> ½ ( (U|V) – (u|v) ) e(x) constant bij rigid-body transformation")
10
Elasticiteit Density is functie van e(x) In dit paper: homogeen elastisch materiaal
 In dit paper: homogeen elastisch materiaal")
12
Manipulation constraints Aanname: beweging en momentum geen effect

13
Configurations Stable Equilibrium Configurations Admissible Configurations

14
Planning Zoeken naar: continue curve in C free, waarvoor geldt: –Manipulability –Quasi-staticity –Elastic admissability

15
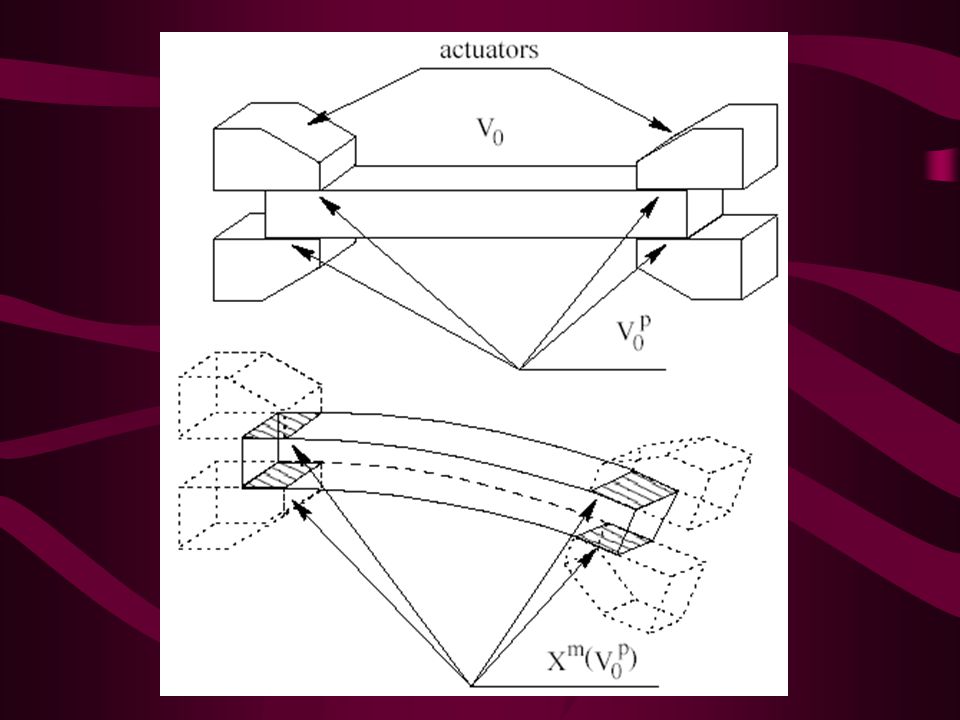
Geometrische representatie

16
Aannames Manipulation constraint constant Materiaal homogeen elastisch Beweging is continu

17
Het algoritme Gebaseerd op PRM Stap 1: –Genereer random actuator configuration –Bereken elastisch minimum –Genereer rigid-body transformaties –Test op doorsnijdingen

18
Het algoritme Stap 2: –Verbind met K closest neighbours –Controleer op doorsnijding en elastische grenzen

19
Het algoritme Stap 3: –Bekijk configuraties met weinig verbindingen –Genereer dichtbijliggende configuraties zonder object van vorm te veranderen

20
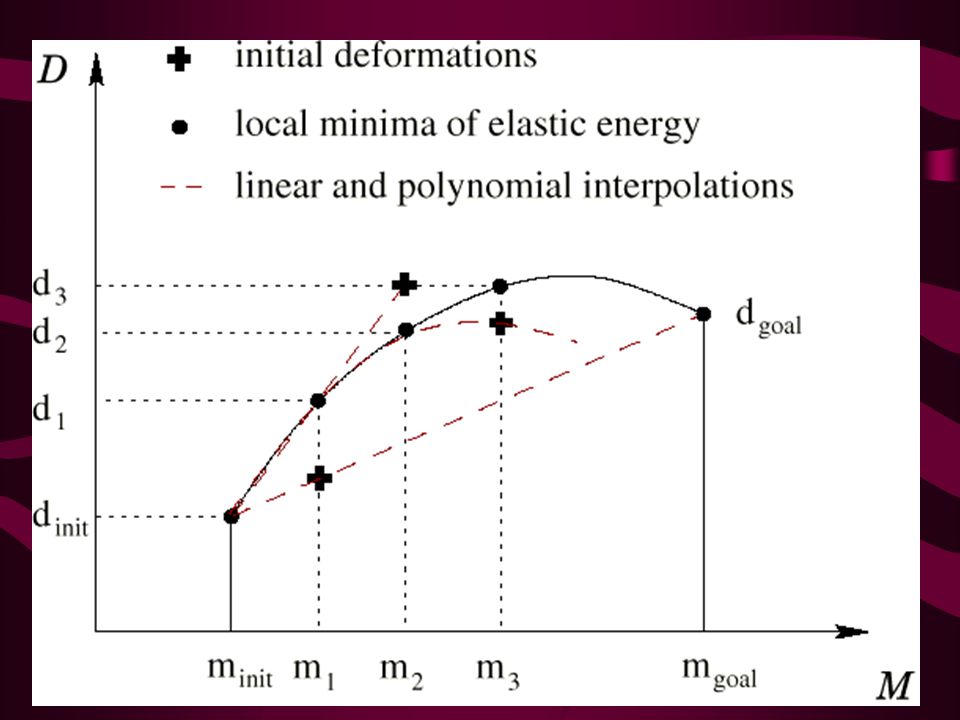
Local Planner q = (d, r) d element van D r element van R 3 Local planner zoekt pad tussen q init = (d init,r init ) en q goal = (d goal,r goal )
 d element van D r element van R 3 Local planner zoekt pad tussen q init = (d init,r init ) en q goal = (d goal,r goal )")
22
Local planning 1 Alleen rigid-body transformaties 2 Deformatie met energie minimalisatie Distance: d(p, q) = d d (p, q) + d r (p,q)
 = d d (p, q) + d r (p,q)")
23
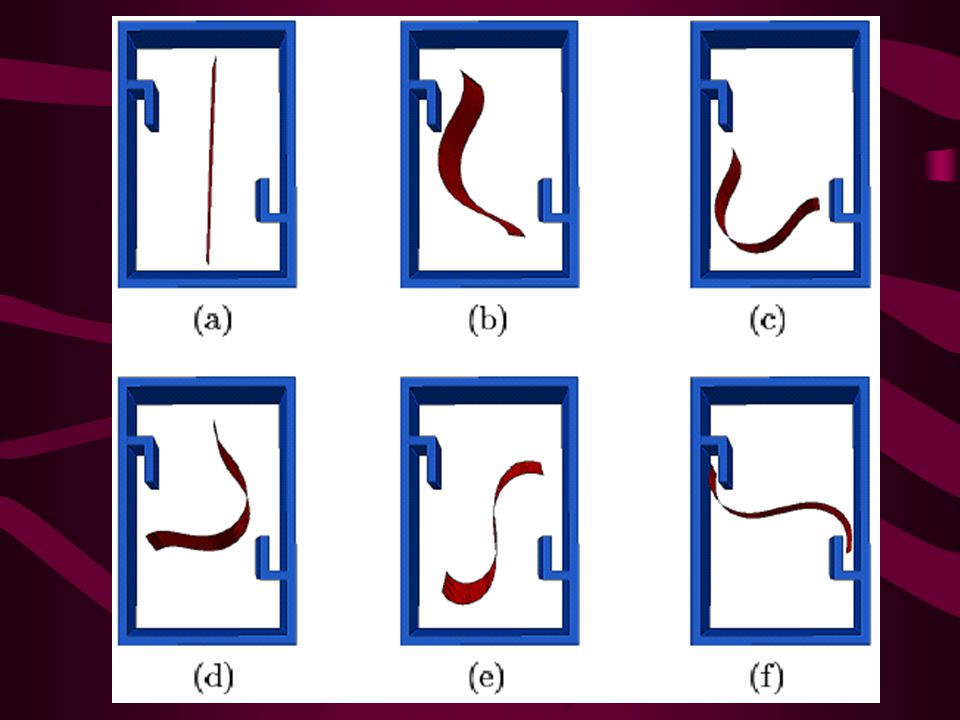
Voorbeeld: elastische plaat Dimensies: 7

24
Mechanisch model

25
Geometrische representatie Bezier curves Control points afhankelijk van u

27
Resultaten Gemiddelde oplossingstijd: 22.7 minuten Roadmap: 12500 nodes 14 componenten

28
Voorbeeld: elastische plaat (2) 9 dimensies Mechanisch model hetzelfde Representatie met cubic splines
 9 dimensies Mechanisch model hetzelfde Representatie met cubic splines")
29
Resultaten Gemiddelde oplossingstijd: 4 uur en 12 min Roadmap: 33600 nodes 12 componenten

30
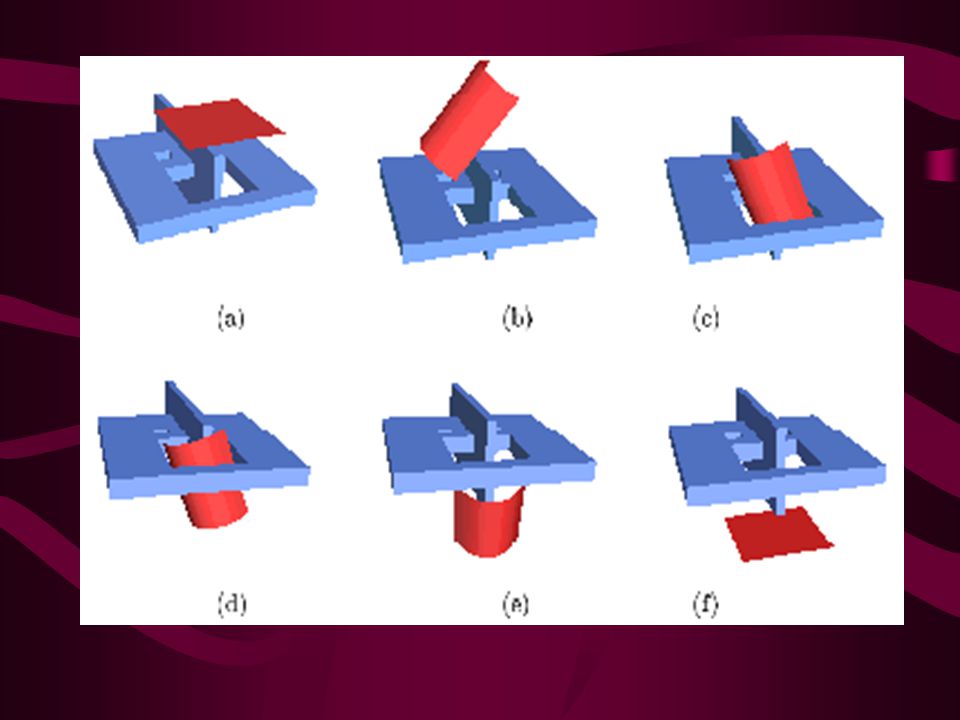
Voorbeeld: elastische pijp 11 dimensies

31
Mechanisch model Onderscheid tussen lineaire en angulaire rek

32
Mechanisch model Onderscheid tussen lineaire en angulaire rek

33
Mechanisch model Onderscheid tussen lineaire en angulaire rek

35
Resultaten Gemiddelde oplossingstijd: 14.2 min Roadmap: 200 nodes 3 componenten

36
Conclusies Veel ruimte voor aanvullend onderzoek –Energy-modellen –Geometrische representatie –Hoe beweeg je instrumenten? Is PRM goede methode?

Verwante presentaties







 •Gegeven een “robot” A in een ruimte W, een verzameling obstakels B, en een start en doel positie, bepaal een beweging voor.>")





 –Analyse –Oplossen.>")







