Download de presentatie
De presentatie wordt gedownload. Even geduld aub

1
Maarten Van Lier 2 e Master Computerwetenschappen

2
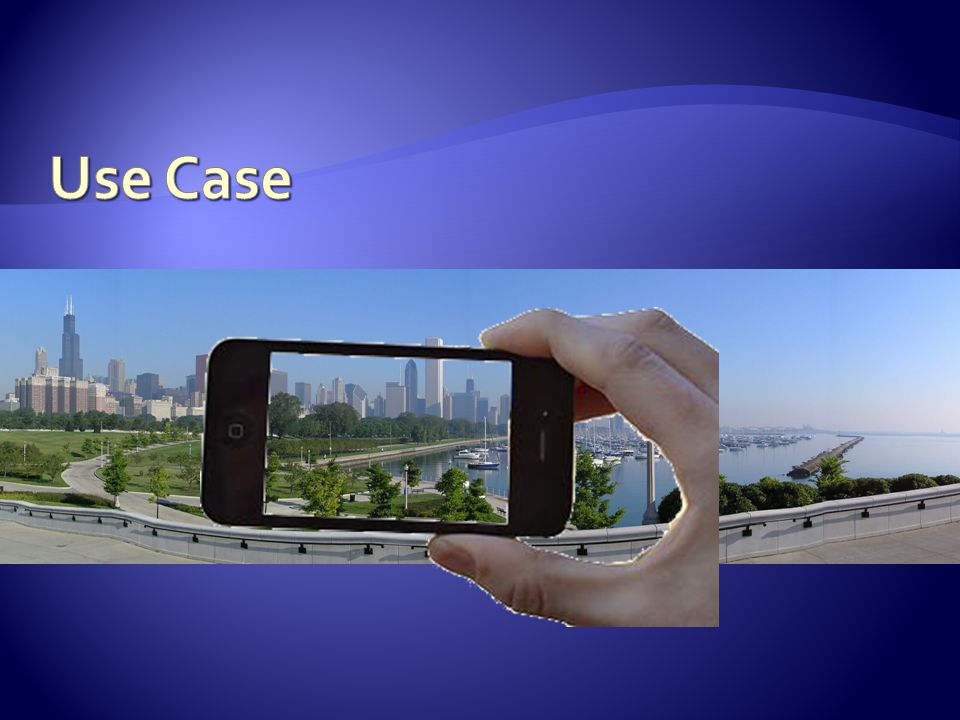
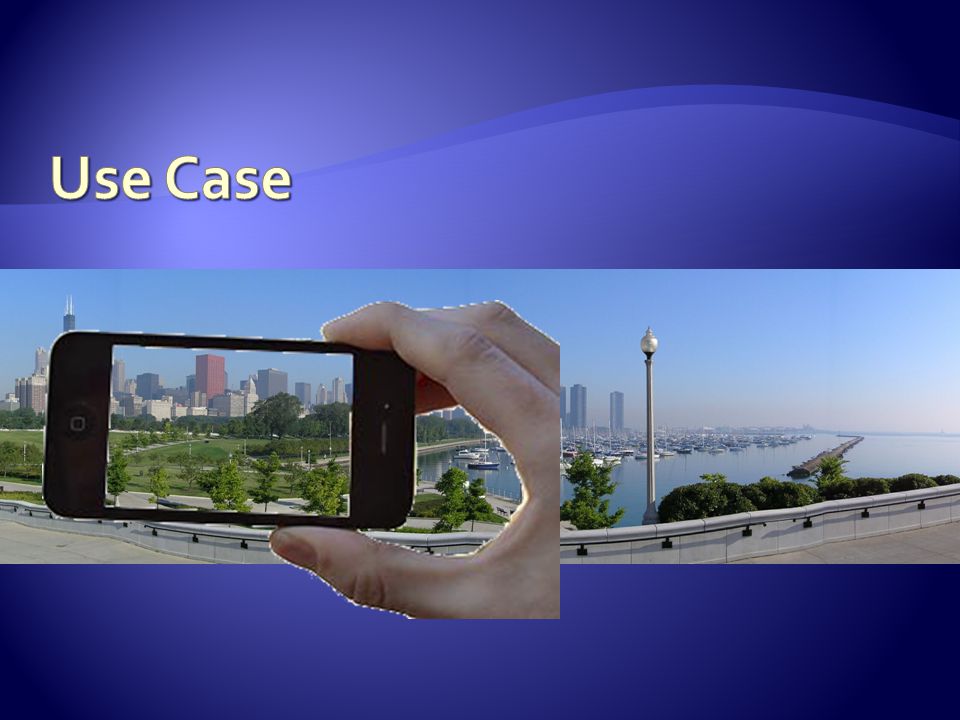
Use Case Motivatie FGSIA algoritme Evaluatie Besluit Moeilijkheden Demo

6
Stitching algoritmen + Geavanceerd, veel onderzoek + Goede resultaten - Enkel op PC Panorama apps + Op smartphone - Eenvoudige algoritmen - Sensoren volledig vertrouwd voor alignatie

8
Eenvoudige algoritmen Foto’s naast elkaar plaatsen Eenvoudige blending Eenvoudig gebruik van sensoren Geen filtering of extra processing Wel snel resultaat

9
Beste van twee werelden: Geavanceerde algoritmen Op smartphone Moeilijk door beperkingen smartphone!

10
Rekenkracht & geheugen = beperkt Efficiënt algoritme = belangrijk! Volledig op smartphone Binnen redelijke tijd Oplossing: gebruik smartphone sensoren Oriëntatiebepaling Initiële alignering Rekenwerk reduceren

11
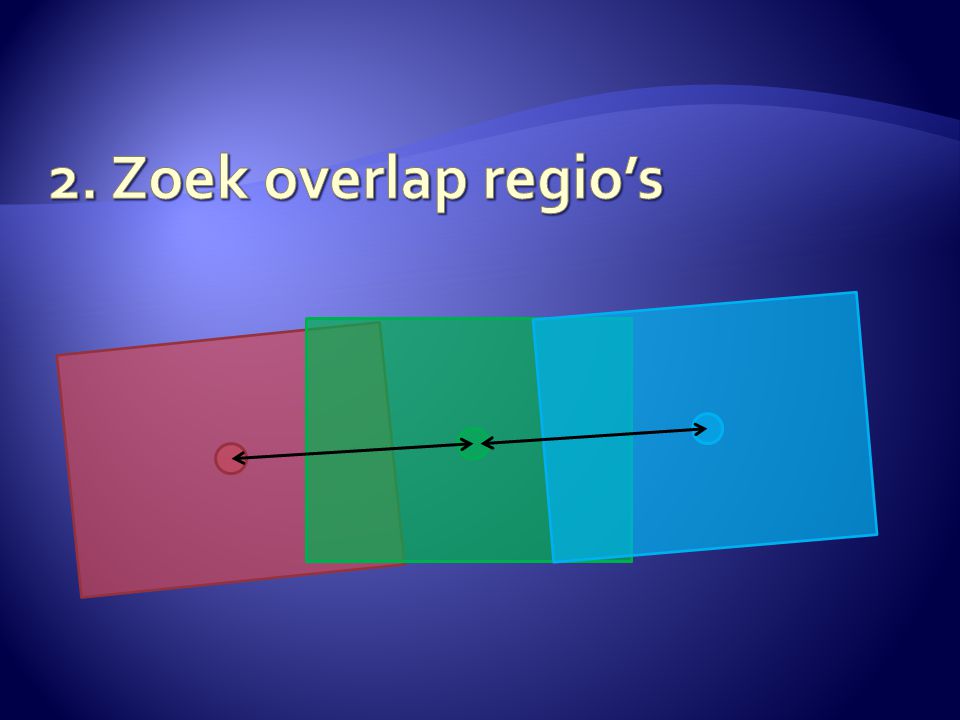
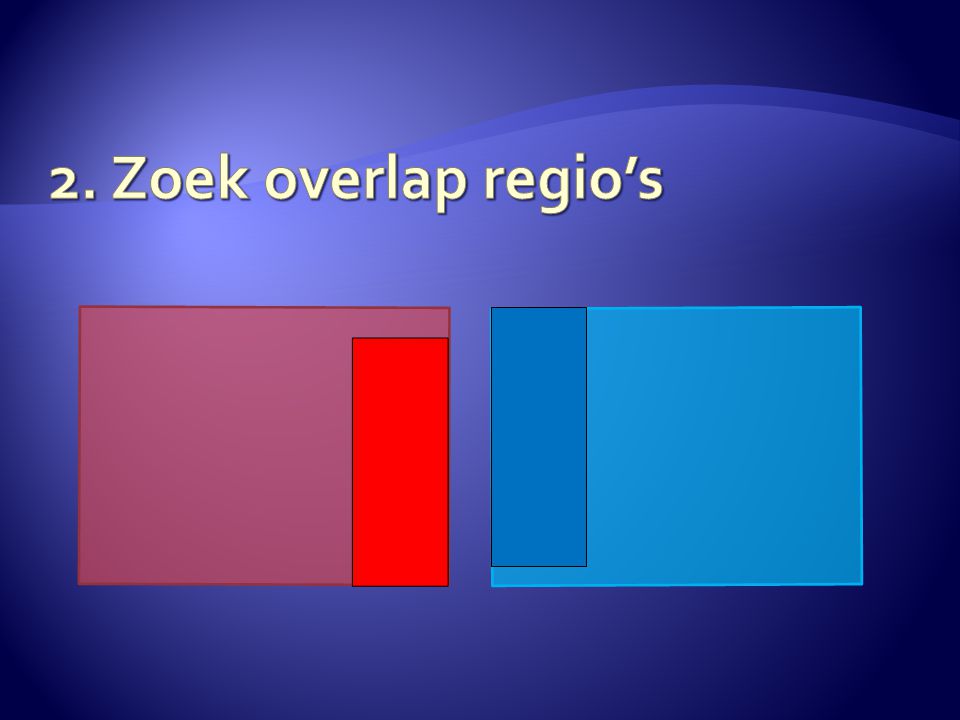
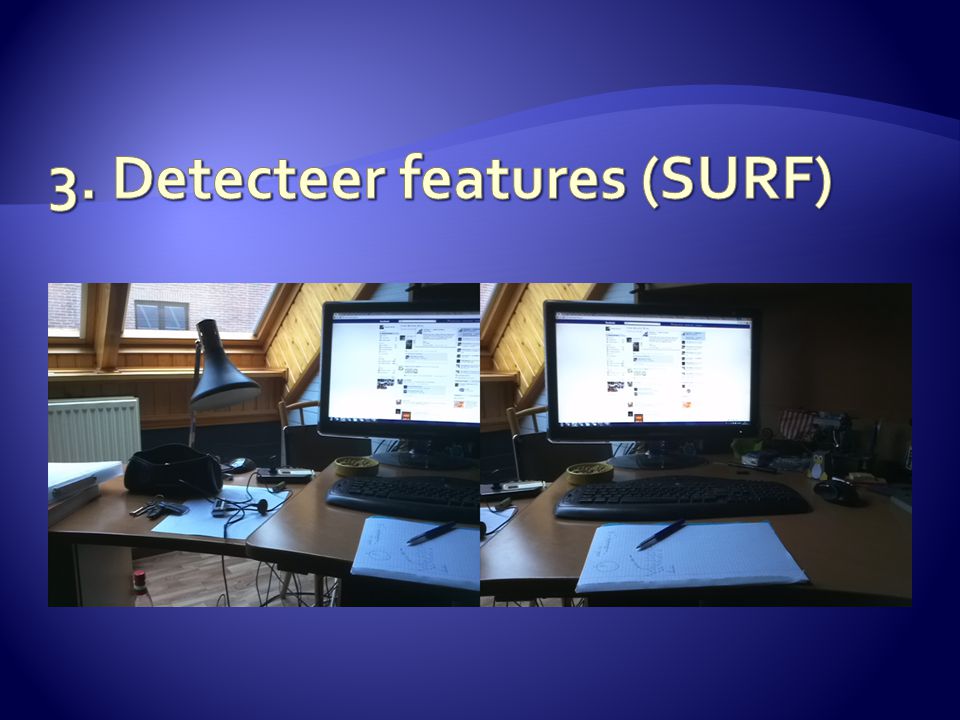
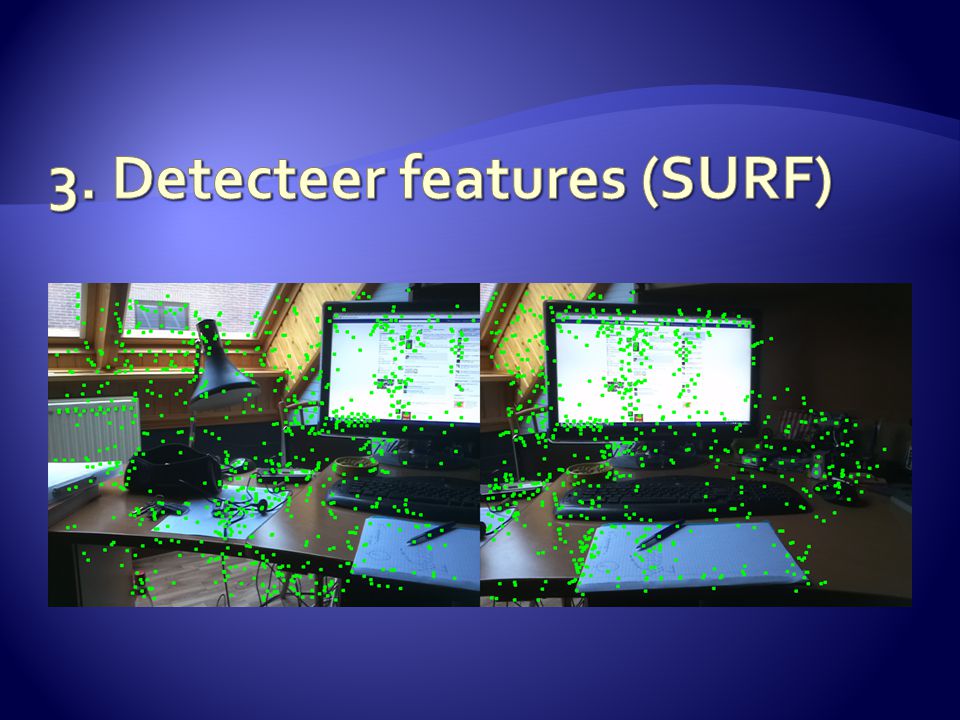
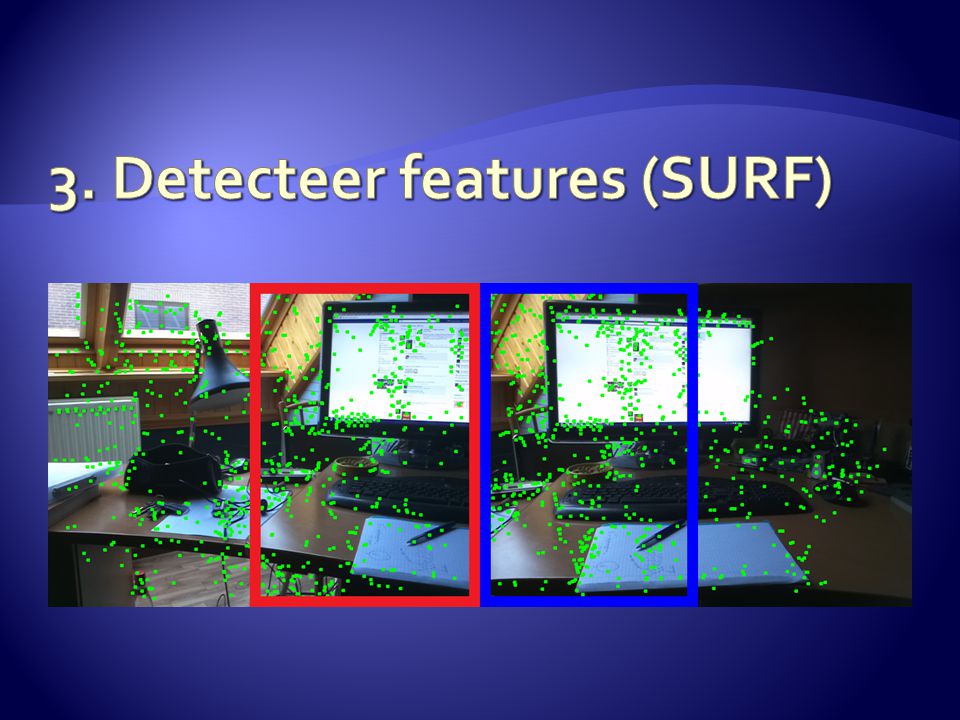
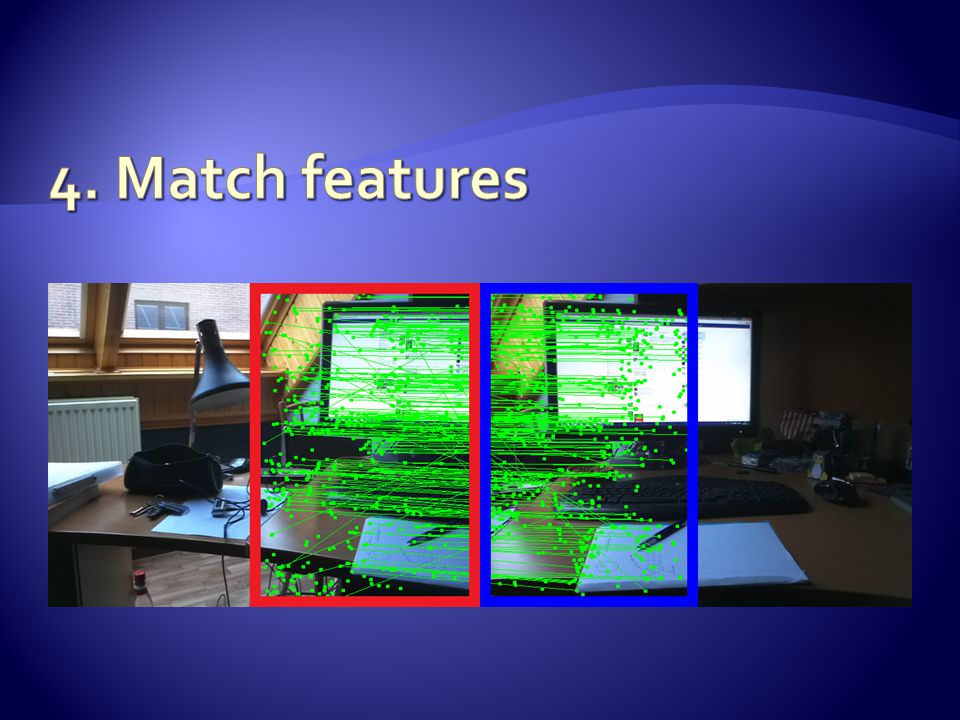
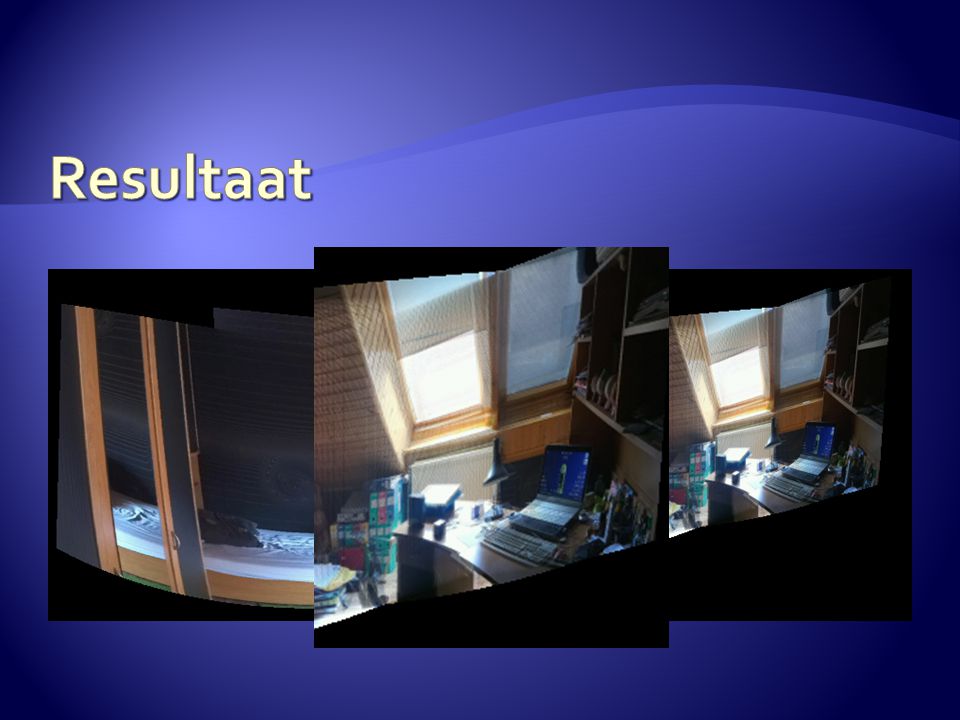
Neem foto’s met smartphone app Met 3D preview Sla sensordata op Vind overlap regio’s Gebruik sensordata Extraheer features Uit overlap regio’s Vind gelijke features In overeenkomstige overlap regio’s Vind een alignatie tussen die foto’s (homografie) Voeg het resultaat samen
 Voeg het resultaat samen")
16
Hier: 50% overlap

20
Wrsch. match Onwrsch. match Mogelijk foute match

24
Standaard algoritme FGSIA algoritme 7 foto’s inladen 28 ms 5953 features 1244 ms Feature matching 7412 ms Compositing 3795 ms Totaal: 12,451 sec 7 foto’s inladen 28 ms 17 overlap regio’s bepalen 151 ms 4320 features (-27,43%) 1186 ms (-4,66%) Feature matching 1000 ms (-86,51%) Compositing 3798 ms Total: 6,135 sec (-50,73%)
 1186 ms (-4,66%) Feature matching 1000 ms (-86,51%) Compositing 3798 ms Total: 6,135 sec (-50,73%)")
25
ComputerSmartphone 8 foto’s inladen 24 ms 28 overlap regio’s bepalen 127 ms Extract 5795 features 3869 ms Match features 4771 ms Compositing (1024x512 pixels) 2706 ms Total: 11,5 seconds 94 ms (x3,92) 339 ms (x2,67) 24674 ms (x6,38) 68061 ms (x14,27) 131884 ms (x48,74) Total: 225 seconds (x19,57)
 2706 ms Total: 11,5 seconds 94 ms (x3,92) 339 ms (x2,67) ms (x6,38) ms (x14,27) ms (x48,74) Total: 225 seconds (x19,57)")
26
Met FGSIA algoritme: snelheidswinst Vooral matching fase Gemiddeld 50 à 80% snelheidswinst Sensoren niet perfect Grotere overlap regio Enkel nabije features Geen spectaculaire snelheidswinst

27
Sensoren Niet perfect, kompas drift OpenGL ES visualisatie Vooraf geen ervaring Coördinaatsystemen 6 verschillende systemen

28
Library keuze OpenCV vs BoofCV Port naar Android (geheugen) Ongebruikte data weggooien Max 7 à 10 foto’s Paper omzetten naar implementatie Meer werk dan verwacht
 Ongebruikte data weggooien Max 7 à 10 foto’s Paper omzetten naar implementatie Meer werk dan verwacht")
Verwante presentaties









 DoelgroepVerzondenOntvangen% LG wonen en dagbesteding.>")








 Begeleider: Joris Klerkx Promotor: E.Duval.>")





