Download de presentatie
1
Movable Objects Richard Jacobs Robin Langerak

2
Movable Objects Introductie en definities Aanpak Aangepaste algoritmen Grasp planning Assembly planning

3
Introductie

4
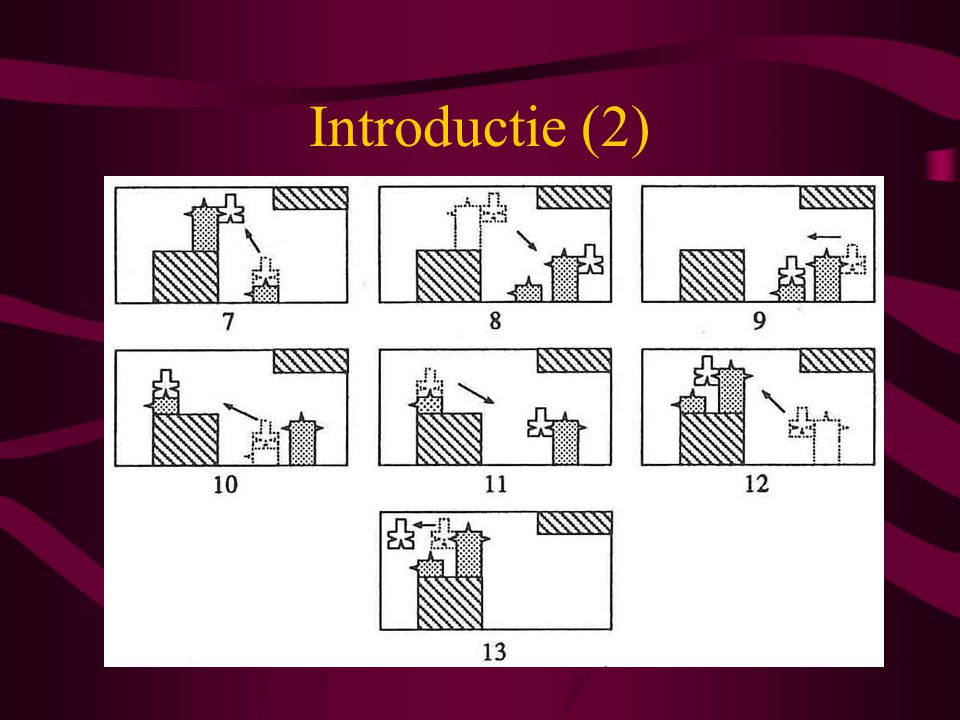
Introductie (2)
")
6
Definities A Robot CA ’s configuration space M i Beweegbare objecten C Mi M ’s configuration space B i Niet-beweegbare objecten

7
Grasp sets en stabiliteit Objecten M alleen beweegbaar na GRASP GRASP alleen mogelijk als q A /q Mi G i UNGRASP alleen mogelijk als M stabiel is Stabiliteit is NP-hard

8
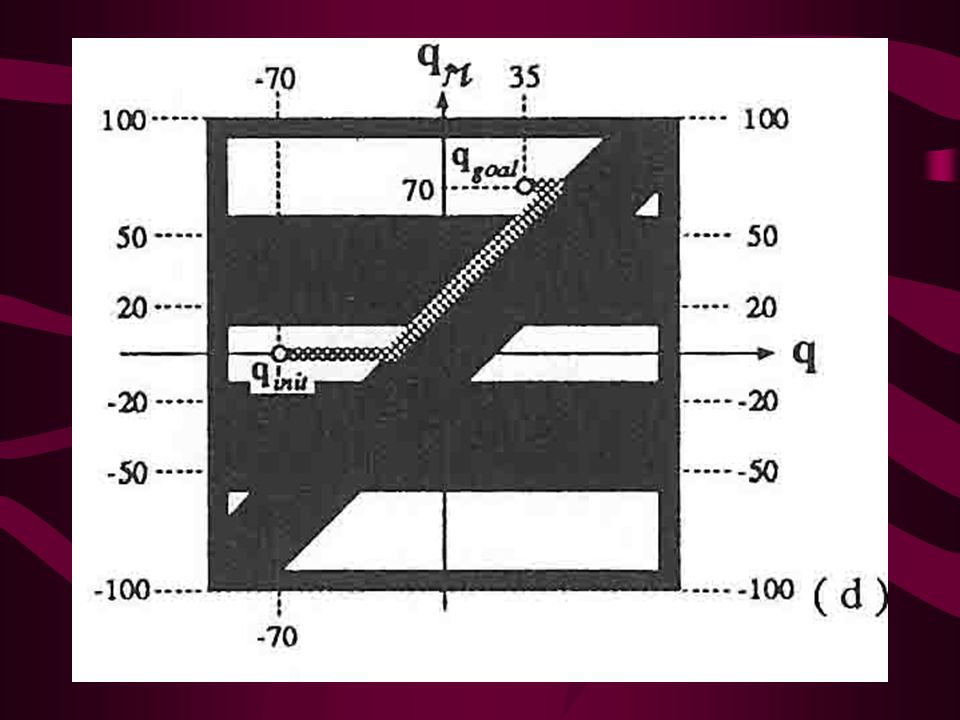
Paden: definities Composite configuration space C * = C x C M1 x … x C Mr q * = (q, q M1, …, q Mr ) Projection π A : q * -> q π Mi : q * -> q Mi
 Projection π A : q * -> q π Mi : q * -> q Mi")
9
Paden: definities (2) A -free configuration Geen doorsnijdingen Stabiliteit A M i - free configuration Geen doorsnijdingen Stabiliteit Grasp
 A -free configuration Geen doorsnijdingen Stabiliteit A M i - free configuration Geen doorsnijdingen Stabiliteit Grasp")
10
Paden: definities (3) Transfer paths: –elke positie is A M i - free –positie van A ten opzichte van M is constant –A raakt geen object aan –alle andere objecten zijn constant
 Transfer paths: –elke positie is A M i - free –positie van A ten opzichte van M is constant –A raakt geen object aan –alle andere objecten zijn constant")
11
Paden: definities (4) Transit paths: –elke positie is A - free –A raakt geen object aan –alle objecten zijn constant Manipulation paths
 Transit paths: –elke positie is A - free –A raakt geen object aan –alle objecten zijn constant Manipulation paths")
12
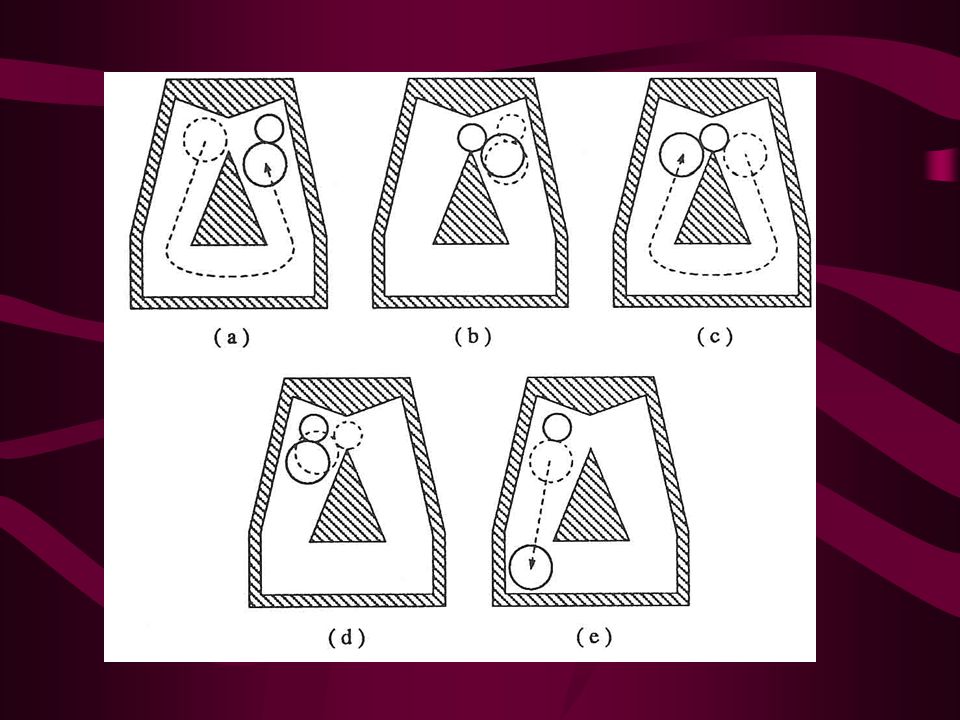
Voorbeeld

14
De aanpak C free GRASP STABLE GRASP: A M - free STABLE: A - free

15
Transfer paths: –elke positie is A M i - free –positie van A ten opzichte van M is constant –A raakt geen object aan –alle andere objecten zijn constant Transit paths: –elke positie is A - free –A raakt geen object aan –alle objecten zijn constant

17
De aanpak: 1 object Geval met een movable object 1 Bepaal knooppunten in STABLE GRASP

19
De aanpak: 1 object 2 Bereken pad tussen knooppunten 3 Maak graaf van knooppunten 4 Bereken kortste pad

21
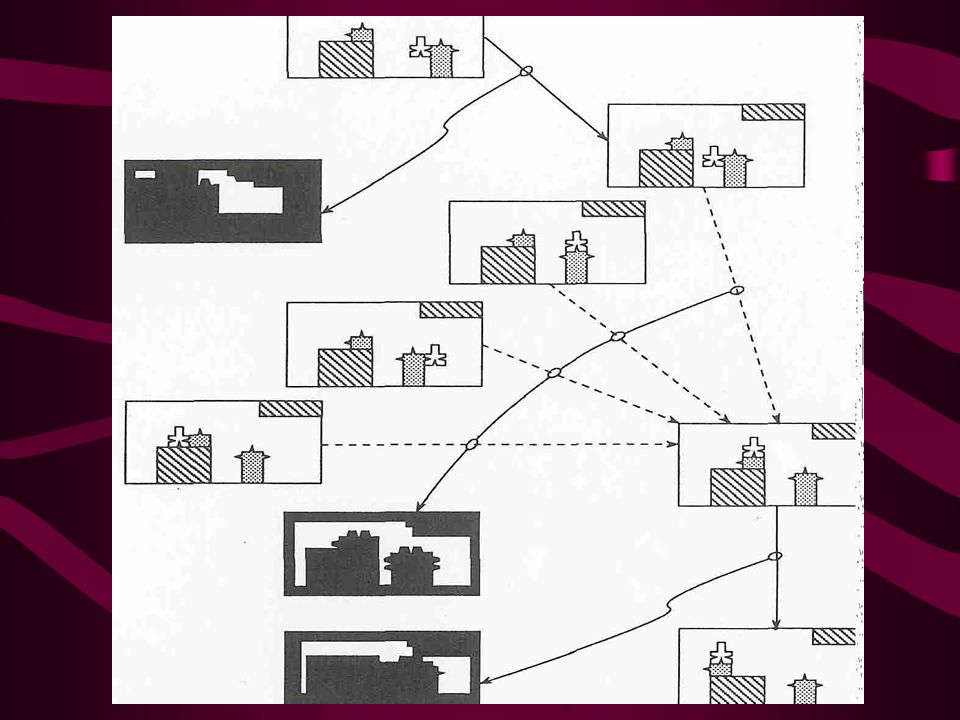
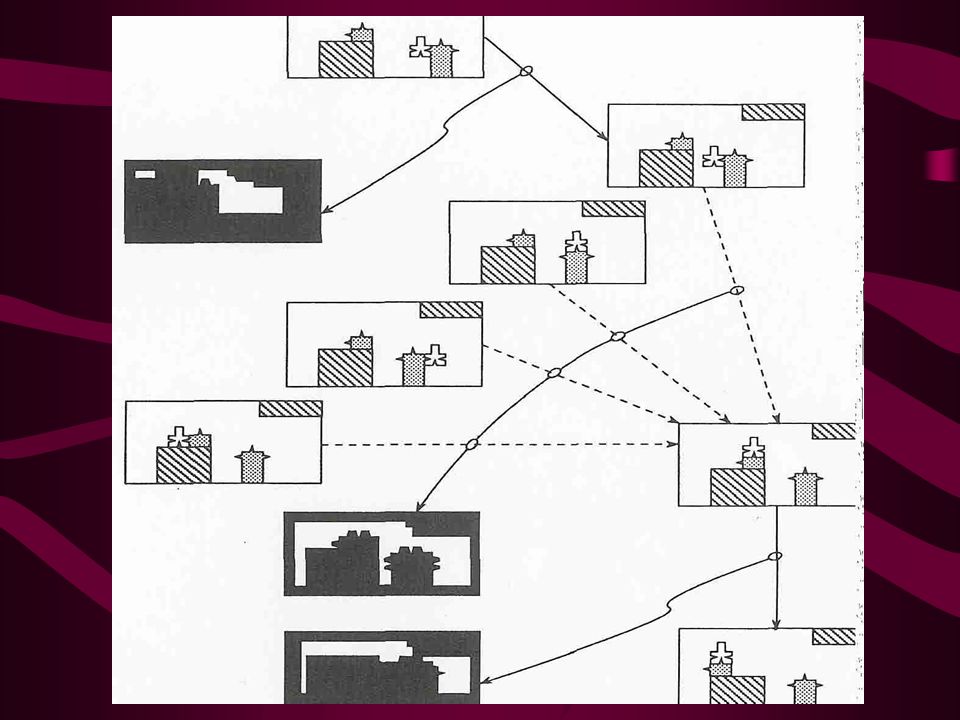
De aanpak: n objecten Construeer n grafen Verbind twee knooppunten als: Transit path –π M (q * 1 ) = π M (q * 2 ) –Er bestaat een pad tussen de twee punten
 = π M (q * 2 ) –Er bestaat een pad tussen de twee punten")
22
De aanpak: n objecten Construeer n grafen Verbind twee knooppunten als: Transfer path –π A (q * 1 ) /π M (q * 1 ) G i –π A (q * 1 ) /π M (q * 1 ) = π A (q * 1 ) / π M (q * 2 ) –Er bestaat een pad tussen de twee punten
 /π M (q * 1 ) G i –π A (q * 1 ) /π M (q * 1 ) = π A (q * 1 ) / π M (q * 2 ) –Er bestaat een pad tussen de twee punten")
24
Oneindig veel grijppunten

27
De aanpak Bouw graaf van knooppunten Zoek kortste pad Kosten : O(n 4 )
")
28
Vragen?

29
Grasp planning Robot uitgerust met gripper Meerdere vingers Goede positie vingers berekenen Fysische en geometrische beperkingen

30
4 overwegingen Force closure –Elke kracht, draaiing uitgeoefend op object moet weerstaan worden door vingers Stabiliteit –Object mag niet draaien/slippen in vingers Minimalisatie grijpkrachten –Voorkomt vervormingen aan object en vingers Geometrische haalbaarheid –Object kan als obstakel fungeren voor vingers Tolerantie: plaatsing bij benadering

31
Force closure Gripper gezien als set vingertoppen 3 soorten vingertoppen –Frictionless –Hardcontact –softcontact

32
Force closure: object

33
Force closure: grijppunten

34
Force closure: tolerantie

35
Stabiliteit Elke vinger als set onafhankelijke springveren Eenvoudige heuristiek: Bedek vingers met zacht rubber

36
Minimalisatie grijpkrachten 2 vingers Heuristiek: minimaliseren afstand tussen projectie van zwaartepunt van object tot elke vinger

37
Geometrische haalbaarheid Uitgangspunt: Set kandidaatgrepen Aanpak –Eerst pad gripper berekenen –Dan pad voor hele robot berekenen (indien onmogelijk: ander pad gripper)
")
38
Geometr. Haalbaarheid: grasp plane

39
Geometr. Haalbaarheid: Obstakels

40
Geometr. Haalbaarheid: grasp zone

41
Geometr. Haalbaarheid: Obstakel-regio’s

42
Assemblage Planning Voorbeeld doos met lading AND/OR graph

43
Vragen?







 •Gegeven een “robot” A in een ruimte W, een verzameling obstakels B, en een start en doel positie, bepaal een beweging voor.>")
















>")