Download de presentatie
1
Coordinated path planning for Multiple Robots Siu-Siu Ha

2
Multi robot path planning Decoupled planning: Paden van robots los vanelkaar plannen en dan naar interactie kijken. Coordinated approach: Centralized planning, combineren configuratieruimte van de robots.

3
Roadmap Simple roadmap per robot Combineren tot een super-graph Van de composite robot (A1,..,An), een toegestane pad construeren van start naar goal in de super-graph. a b c d (a,b) (a,d)(b,d) (a,c)(b,c) A1 A2 (A1,A2)
 (a,d)(b,d) (a,c)(b,c) A1 A2 (A1,A2).")
4
Notaties Pad P. Begin pad = P(0) Eind pad = P(1) Concatenatie: P Q als P(1) = Q(0) Roadmap G = (V, E) A(x)= Volume van robot A op node x A(e)= Sweep volume van edge e van robot A. A(e) A(x) = edge e geblokkeerd door x
 Eind pad = P(1) Concatenatie: P Q als P(1) = Q(0) Roadmap G = (V, E) A(x)= Volume van robot A op node x A(e)= Sweep volume van edge e van robot A. A(e) A(x) = edge e geblokkeerd door x.")
5
Discretised Coordinated Paths (1) Composite robot (A1,.., An) Vrije begin configuratie (s1,.., sn) Vrije eind configuratie (g1,.., gn) Pad P1 tussen s1 en g1,.., pad Pn tussen sn en gn Coordinated path (P1,..,Pn)
 Composite robot (A1,.., An) Vrije begin configuratie (s1,.., sn) Vrije eind configuratie (g1,.., gn) Pad P1 tussen s1 en g1,.., pad Pn tussen sn en gn Coordinated path (P1,..,Pn)")
6
Discretised Coordinated Paths (2) Trivial coordinated path: Slechts 1 robot beweegt tegelijkertijd (P1,..,Pn) (Q1,..,Qn) = (P1 Q1,..,Pn Q1) Discretised coordinated path is concatenatie van trivial coordinated paden. Identity path: Robot beweegt niet

7
Roadmap G = (V, E) met n robots Flat super-graph FG = (VF, EF) (x1,.., xn) is een node van FG als voor alle i en j geldt: A(xi) A(xj) Supernodes X(x1,..,xn ) en Y(y1,..,yn) zijn verbonden als: Een trivial coordinated pad tussen de supernodes Geen blokkage beweging door rest van de robots. Flat super-graph (1) y1 y2 y3 x1 x2 x3 x4 x3 x2 x4 x1
 y1 y2 y3 x1 x2 x3 x4 x3 x2 x4 x1.")
8
Flat super-graph (2)
")
9
Multi-level super-graph (1) Grootte flat super-graph exponentieel in het aantal robots Idee: Alleen als robots in dezelfde buurt komen, kunnen ze elkaar blokkeren en kunnen er deadlock situaties ontstaan. Neighbourhood (subgraph):Dienen independent te zijn. Geen node van een andere subgraph mag een edge van jou blokkeren.
:Dienen independent te zijn. Geen node van een andere subgraph mag een edge van jou blokkeren..")
10
Multi-level super-graph (2) (x1,x2,x3) X (x4,x5,x6,x7) = (A,B) (x4,x5,x6,x7) X (x1,x2,x3) = (B,A)
 (x1,x2,x3) X (x4,x5,x6,x7) = (A,B) (x4,x5,x6,x7) X (x1,x2,x3) = (B,A)")
11
Multi-level super-graph (3) [(x3,x7), (x3,x4), (x1,x4),(x1,x2), (x3,x2), (x4,x2)] [(A,B), (x1,x2), (x3,x2), (B,A)]
![Multi-level super-graph (3) [(x3,x7), (x3,x4), (x1,x4),(x1,x2), (x3,x2), (x4,x2)] [(A,B), (x1,x2), (x3,x2), (B,A)]](http://images.slideplayer.nl/8/2164898/slides/slide_11.jpg "Multi-level super-graph (3) [(x3,x7), (x3,x4), (x1,x4),(x1,x2), (x3,x2), (x4,x2)] [(A,B), (x1,x2), (x3,x2), (B,A)]")
12
Independent G-subgraphs

13
G-subdivision tree Each node is a connected G- subgraph, T-nodes G is root van T V van kinderen vormen partitie van V ouder Bladeren bevatten 1 G-node en zitten op dezelfde level ABC G a1a2a3b1b2b3c1c2c3

14
Coverage Nodes samentrekken (E,F) covers: (A,C) ; (B,C) ; (a3,c3) ; (b2, d1) (B,C) covers: (b3, c1) ; (b1, c2) G AB C b1b2b3c1c2c3d1d2d3 D a1a2a3 EF
 covers: (A,C) ; (B,C) ; (a3,c3) ; (b2, d1) (B,C) covers: (b3, c1) ; (b1, c2) G AB C b1b2b3c1c2c3d1d2d3 D a1a2a3 EF")
15
Induced multi-level super-graph (1) Geen super-nodes: (A, B) -> niet-indep. (b1, c1) -> (B, C) (b3, a1) -> niet-indep. Wel super-nodes: (A, C) (B, C) (a3, a1) Pad ertussen als bestaat
 -> (B, C) (b3, a1) -> niet-indep. Wel super-nodes: (A, C) (B, C) (a3, a1) Pad ertussen als bestaat.")
16
Induced multi-level super-graph (2)
")
17
Path retrieval (1) ((s1,.., sn), (g1,.., gn)) si’s en gi’s in V Vind node Xs in MGT zodat Xs covers (s1,.., sn). Vind node Xg in MGT zodat Xg covers (g1,.., gn). Vind pad P = [X1,.., Xn] in MGT Vind Ti’s tussen de Xi en Xi+1 Vind paden in de knopen van in naar uit
. Vind pad P = [X1,.., Xn] in MGT Vind Ti’s tussen de Xi en Xi+1 Vind paden in de knopen van in naar uit.")
18
Path retrieval (2) Y1 in en Y2 uit, zijn covered door dezelfde multi-level super-node X2. P2 is covered door X2 VB: X2(A,C); (a1, c3) (a1, c2) (a3, c2) T2 tussen X2 en X3 is pad van edge van FG
; (a1, c3) (a1, c2) (a3, c2) T2 tussen X2 en X3 is pad van edge van FG.")
19
Path retrieval (3) Uiteindelijke pad P is een G-discretised coordinated pad. P = P1 T1 P2 T2 … Kan ook vanuit willekeurige configuraties, coordinated retraction.

20
Verdere verbeteringen Sieving Verdere reductie van grootte van graph Slechts deel van MGT nodig, de grootste subgraphs. Smoothing Simultaan bewegende robots Shortcuts

21
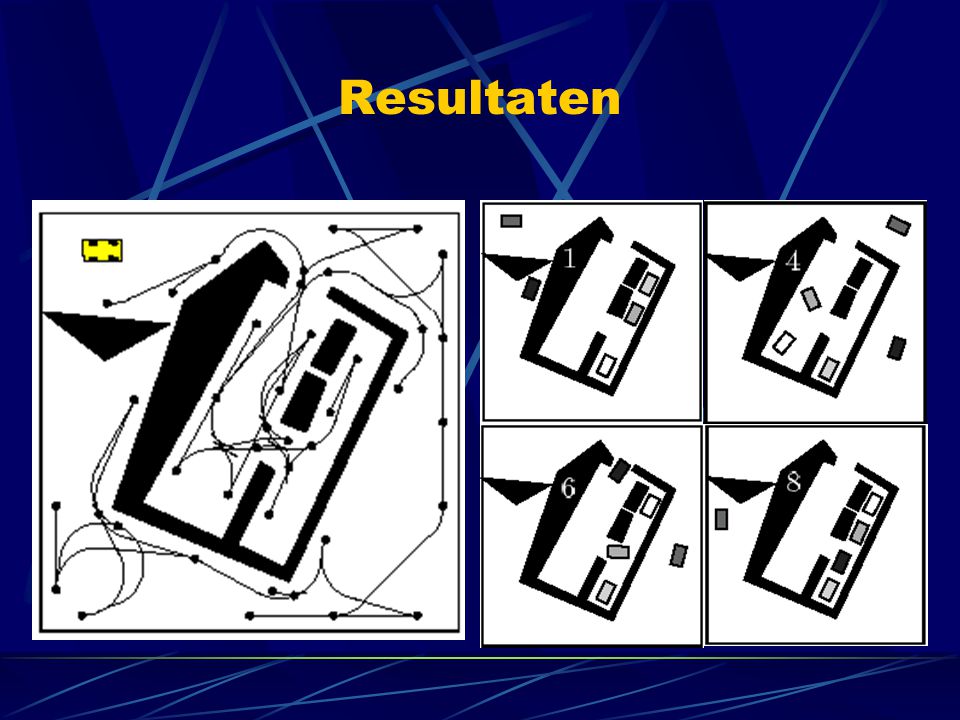
Resultaten





 •Gegeven een “robot” A in een ruimte W, een verzameling obstakels B, en een start en doel positie, bepaal een beweging voor.>")















